Description
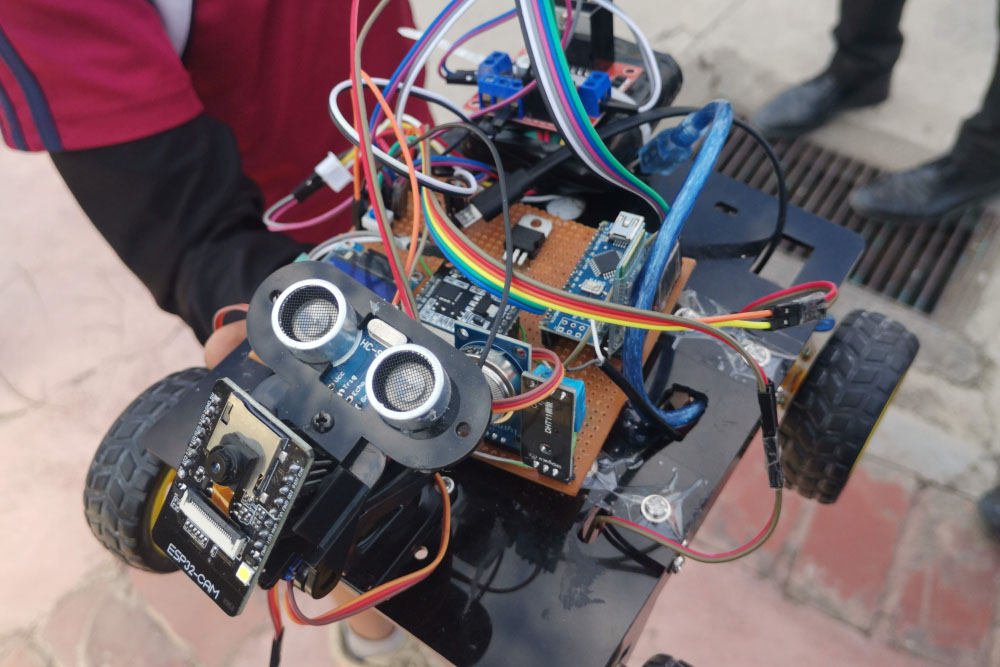
Prototype 1 - A 4WD semi-autonomous rover that would drive around the city on and off road detecting pollution levels using onboard sensors such as Shinyei PPD42 Particulate Matter Detector, MQ-2 Gas Sensor, MQ-9 Gas Sensor, MiCS-2714 Gas Sensor (NO2) MiSC-2614 Gas Sensor (Ozone), Keyes DHT11 Temperature and Humidity Sensor. These sensors collect data from the surrounding of the rover and send it to the base station along with the current coordinates of the rover so that pollution data can be pin-pointed on a map with much more precision than our current satellite based methods. The rover also had an onboard camera to click pictures of pollution sources as for evidence when the government takes action.Prototype 2 - A smaller version of the detection system which could be fit on the exterior of vehicles such as taxis, trucks etc… as these vehicles have a very large usage and cover maximum. This prototype can be just attached on the exterior of the vehicles to send the same metrics as Prototype 1 but without any visuals.
Prototype 3 - Another smaller version of prototype 1 which is pocket-friendly, the user gets a notification with the pollution metrics and the base station is provided with anonymous location tagged pollution metrics.
Prototype 4 (an idea not prototyped yet)- A drone based pollution surveillance system that conducts random pollution checks and inspections of the city.
Concepts Utilised
Thank to pop me out of that button, but now i'm done so you can close this window.Skills Developed:
- Arduino Programming
- Utilisation of MQTT Protocol to transfer data over the internet
- Connecting with GPS Satellites and sharing location information
- How different organisation measure pollution and the drawsbacks of their methods
- Realtime data visualization on Adafruit IO Platfomr
- Robot Design